Sistemi navetta 4D per applicazioni cù carichi pesanti
Descrizzione
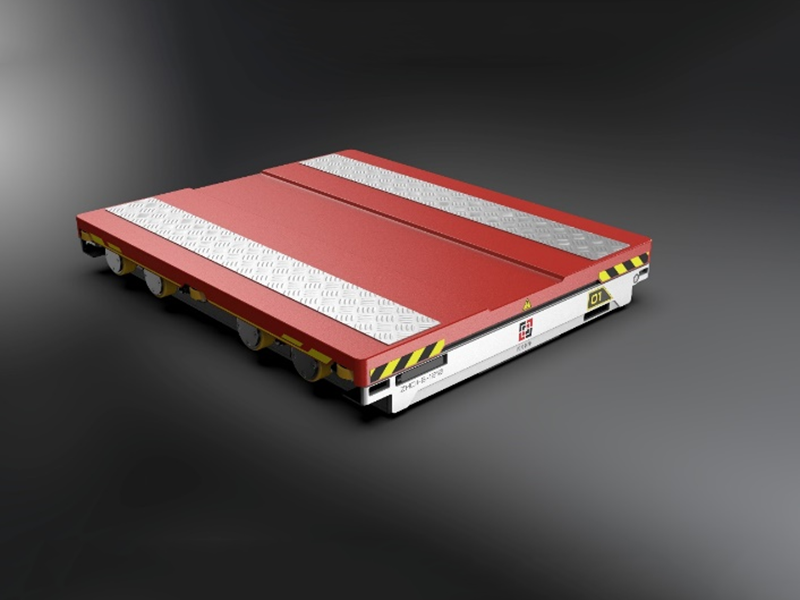
Cum'è l'equipaggiu principale di u sistema di almacenamentu densu intelligente, a navetta 4D hè cumposta principalmente da una cumminazione di telai, un sistema elettricu, un sistema di alimentazione, un sistema di guida, un sistema di sollevamentu, un sistema di sensori, ecc. Hà cinque modi: telecomandu, manuale, semi-automaticu, automaticu lucale è automaticu in linea. Vene cun parechje prutezioni di sicurezza è avvisi di sicurezza, allarmi di sicurezza regiunali, allarmi di sicurezza operativi è allarmi di sicurezza interattivi. I rivestimenti sò cunnessi da saldature cù prutezzione di gas è bulloni ad alta resistenza. A cumminazione di rack adotta una struttura à doppiu stratu. L'aspettu hè tuttu verniciatu à spruzzu, è e parti lavorate è e staffe elettriche sò elettroplaccate. Hà dui insemi di sistemi di guida è dui insemi di sistemi di sollevamentu. I sistemi di guida sò incaricati di e direzioni XY. Unu di i sistemi di sollevamentu hè incaricatu di u sollevamentu di e cariche, è l'altru hè incaricatu di u cambiamentu di corsia primaria è secundaria. A direzzione Z di l'altezza pò realizà u cambiamentu di stratu di a navetta 4D aduprendu un ascensore persunalizatu. In modu da realizà a funzione di accessu à u spaziu tridimensionale.
A struttura di u tipu di carica pesante hè basicamente a listessa chè quella di a versione standard. A principale differenza hè chì a capacità di carica hè assai migliurata, è a capacità di trasportu ghjunghjerà guasi u doppiu di quella di a versione standard. U disignu di u mecanismu di sollevamentu hè rinfurzatu, è a putenza di u mutore di sollevamentu hè aumentata per assicurà chì a capacità di carica pò ghjunghje à 2,5 T. A putenza di u mutore di viaghju ferma invariata. Per aumentà a pruduzzione, u rapportu di riduzione hè aumentatu, è a velocità di marcia di a navetta 4D diminuirà currispundente.
affari standard
Assemblaggio è almacenamentu di ricevute fora di u magazzinu
Stratu di cambiamentu di traslocu è di carica di l'inventariu
Parametri tecnichi
| prughjettu | Dati di basa | Osservazione | |
| mudellu | SX-ZHC-T-1210-2T | ||
| Vassoio applicabile | Larghezza: 1200 mm Prufundità: 1000 mm | ||
| Carica massima | Massimu 2500 kg | ||
| altezza/pesu | Altezza di u corpu: 150 mm, pesu di a navetta: 350 kg | ||
| Camminendu in a direzzione principale X | velocità | Massima senza carica: 1,5 m/s, massima piena carica: 1,0 m/s | |
| accelerazione di a caminata | ≤ 1,0 m/s2 | ||
| mutore | Servomotore senza spazzole 48VDC 1 5 00W | Servu impurtatu | |
| Driver di u servitore | Driver di servo senza spazzole | Servu impurtatu | |
| Camminate in a direzzione Y | velocità | Massima à vuoto: 1,0 m/s, massima à pieno carico: 0,8 m/s | |
| accelerazione di a caminata | ≤ 0,6 m/s2 | ||
| mutore | Servomotore senza spazzole 48VDC 15 00W | Servu impurtatu | |
| Driver di u servitore | Driver di servo senza spazzole | Servu impurtatu | |
| sollevamentu di carichi | Altezza di u martinettu | 30 mm _ | |
| mutore | Motore senza spazzole 48VDC 75 0W | Servu impurtatu | |
| sollevamentu principale | Altezza di u martinettu | 35 mm | |
| mutore | Motore senza spazzole 48VDC 75 0W | Servu impurtatu | |
| Canale principale / metudu di pusizionamentu | Posizionamentu à pedi: posizionamentu di barre / posizionamentu laser | Germania P+F/SICK | |
| Canale secundariu / metudu di pusizionamentu | Posizionamentu di caminata: fotoelettricu + encoder | Germania P+F/SICK | |
| Posizionamentu di u vassoiu: laser + fotoelettricu | Germania P+F/SICK | ||
| Sistema di cuntrollu | Cuntrollore programmabile PLC S7-1200 | Germania SIEMENS | |
| telecomandu | Frequenza di travagliu 433MHZ, distanza di cumunicazione almenu 100 metri | Impurtà persunalizata | |
| Alimentazione elettrica | batteria à u litiu | Alta qualità domestica | |
| Parametri di a batteria | 48V, 30AH, tempu d'usu ≥ 6h, tempu di carica 3h, tempi di ricarica: 1000 volte | A capacità pò varià secondu a dimensione di u veiculu | |
| metudu di cuntrollu di velocità | Servocontrollu, coppia costante à bassa velocità | ||
| Metudu di cuntrollu di a barra trasversale | Pianificazione WCS, cuntrollu di l'urdinatore tattile, cuntrollu di u telecomandu | ||
| livellu di rumore di funziunamentu | ≤60db | ||
| Requisiti di pittura | Cumbinazione di rack (neru), coperchio superiore rossu, anteriore è posteriore in alluminio biancu | ||
| temperatura ambiente | Temperatura: 0 ℃ ~ 50 ℃ Umidità: 5% ~ 95% (senza cundensazione) | ||


